Success! I have the PLL locking onto the ADXL202 now, and my LEDs indicating tilt, all thanks to Lab 4: CMOS 4046 Phase-Locked Loop from a 1997 class at UC Boulder that I found via Google. Thank you, thank you, thank you for putting your courseware online (and leaving it there, apparently indefinitely)!
The lab explained two salient points that I hadn’t seen previously:
1MΩ ≥ [ R1, R2 ] ≥ 10kΩ
100nF ≥ C1 ≥ 100pF
and
How to test each subsection of the chip independently to building a working circuit from the ground up
So here are the values I ended up using. C1 = .1μF and R2 = 100KΩ gave fmin quite a bit slower than my sensor’s 80Hz output, but that was the closest I could do with what I had in my parts bin. Likewise, R1 = 68KΩ gave fmax quite a bit faster than 80Hz, but again, it’s what I was able to do with what I had on hand. I was able to test each of these frequencies and confirm correct operation individually by connecting VCO IN to ground (fmin) and to VDD (fmax) with no SIGNAL IN, and counting hash marks on my scope.
For the low-pass filter (R3 and C2), the cutoff frequency should be much smaller than twice the frequency of the incoming signal (sounds vaguely Nyquistish, eh?), in order for VCO IN to get the average DC component of the phase comparator output. I scratched and calculated a bit, but wasn’t really enjoying it, so picked values I knew would set the cutoff far lower than 160Hz–R3 = 1MΩ and C2 = .01μF. The price of my sin of laziness is that the circuit takes a few seconds to lock onto the input signal at powerup, but I can live with that for now. And because my input signal doesn’t have a strict 50% duty cycle, I’m using the Type II (edge-triggered) phase detector.
I also connected INHIBIT to ground. I don’t know whether it was strictly necessary, but another posting recommended doing so with unused CMOS inputs. It only cost me one more jumper to ground it, and as much trouble as I’d had already, I wasn’t going to let one more little thing stand in my way. Of course, I wired the tilt sensor’s output to the 4046′s input.
And everything worked at last! As noted above, the PLL takes a couple of seconds to lock to the input signal, but once it does, it’s rock-solid every time. It’s encouraging to see that once the capture range is set properly, the 4046 really works predictably. The scope shows the signal wiggling on power-up, but then it settles down.
I also got to use the external trigger input on my scope. I was wishing for a dual-trace scope so I could trigger off the sensor signal and compare it with the PLL signal on the same screen. Can’t do that on my single-trace, but I’m doing the next best thing–using the sensor signal as an external trigger to lock the PLL signal into position. True, I won’t be able to detect very small phase differences this way; but within the resolution of my scope, it sure looks as though they’re in phase.
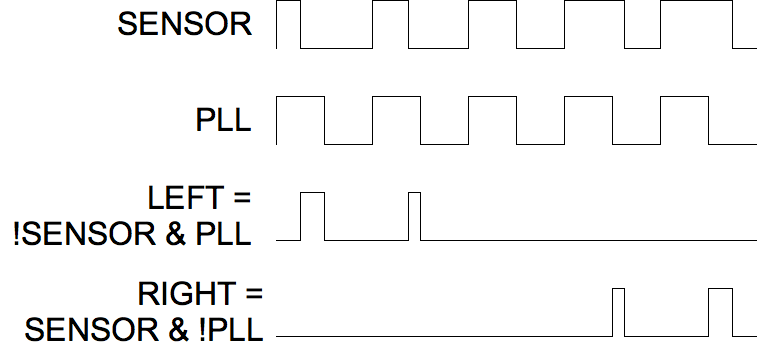
I wired up a 7406 and 7400 to give me the !SENSOR & PLL and !PLL & SENSOR combinations I described earlier, hooked them up to a couple of LEDs, and voila! Visible indication of the operation of my tilt sensor. A little more wiring, and I had four LEDs indicating bidirectional tilt. (Thank goodness the ADXL202 appears to use the same frequency generator for both axes’ PWM outputs, so I didn’t have to wire up another PLL for the Y axis.)
It works great! It works so well, in fact, that it demonstrates that I have the sensor positioned not quite level. And while I was fiddling with it trying to level it, I caused some intermittent connections on its contacts to its carrier. Oh well. It mostly works, and I know how to make it work, and I’m pretty happy about that.
POSTING IN PROGRESS